Создана концепция Robo-Boot обещает на 50% быстрее работать

Независимо от того, как хорошо они разработаны, нет беговых кроссовок, которые позволят бегунам не отставать от велосипедистов. Велосипед был ключевым изобретением, которое удвоило скорость человека. Но что, если новый вид обуви может позволить людям бегать быстрее, имитируя велосипедную механику?
Это вопрос, который студенты Центра Вандербильта задали центру реабилитации инженерии и вспомогательных технологий и исследовали, как разработать новую теорию пружинных управляемых роботизированных экзоскелетов. Исследователи придумали концепцию нового типа экзоскелета нижних конечностей, которая позволила бы самому быстрому человеку в мире достигать скорости 18 метров в секунду или около 40 миль в час.
Передовой край сегодняшних кроссовок является Vaporfly Nike, которая позволяет бегунам использовать на 4% меньше энергии, чем обычные кроссовки. Трехкратный олимпийский призер Элиуд Кипчог недавно надевал их, чтобы пробежать марафон менее чем за два часа. Хотя Vaporfly изменил мир профессионального бега, повысив эффективность стандартных кроссовок, он не дает преимуществ езды на велосипеде или иным образом кардинально изменить физику бега.
Было много исследований и разработок в роботизированных экзоскелетах, которые увеличивают человеческую силу. Они используют приводы и внешнюю энергию: двигатели и аккумуляторы. Но они не помогли людям бежать быстрее. Пружины также использовались для изготовления высокотехнологичных протезов для паралимпийского бега, но не было продемонстрировано несправедливого преимущества по сравнению с ногами. Для человеческой скорости велосипед был действующим чемпионом больше столетия.

Бег против езды на велосипеде
Первой беговой машиной был велосипед без педалей. Это уменьшило затраты энергии на бег, поддерживая вес тела на сиденье и используя колеса, чтобы избежать неизбежной потери энергии при шаге бегунов.
Но ранние велосипеды не позволяли велосипедистам двигаться быстрее, чем бегуны, потому что наездник продвигался вперед, толкая его ногами – как при беге. То, что изменило обстоятельства для езды на велосипеде, было изобретение механизма педалирования, который позволял ногам продвигать наездника непрерывно, а не только когда нога падает на землю.
Преимущество скорости велосипеда перед бегом не выдержало из-за отсутствия попыток. Люди представляли себе пружинные ножки и совершенствовали ходовые пружины на протяжении поколений, но эти пружины не похожи на велосипед с педалями, потому что они не позволяют ногам подавать энергию, когда они находятся на земле.

Робо-ботинок
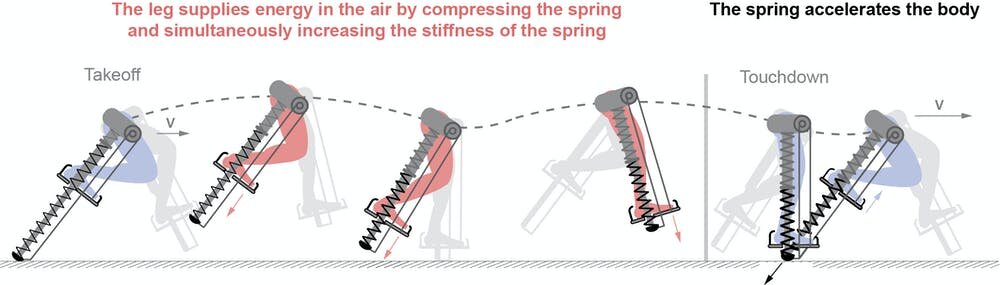
Чтобы применить преимущество езды на велосипеде к бегу, ученые придумали концепцию нового типа робо-ботинка, который имитирует функцию велосипедных педалей. Используя робо-ботинок, бегуны подают энергию, сжимая пружину каждой ногой, пока она находится в воздухе. С каждым шагом пружина высвобождает накопленную энергию, толкаясь быстрее и сильнее, чем ноги.
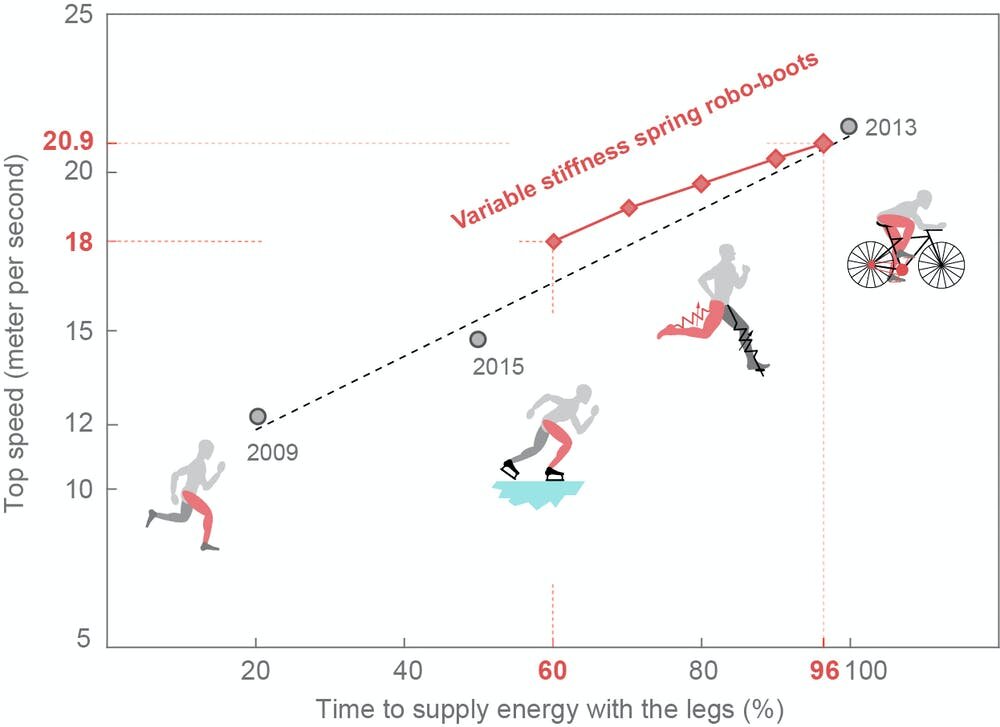
Ученые обнаружили, что идеальный робот-ботинок позволил бы самому быстрому бегуну на Земле использовать свои ноги в 96% случаев, чтобы бегать быстрее, чем 20 метров в секунду, что сопоставимо с максимальной скоростью езды на велосипеде. Более практичный робот-ботинок, который используется только около 60% времени шага, все же может помочь бегуну достичь максимальной скорости 18 метров в секунду. Это на 50% быстрее, чем мировой рекорд скорости 12 метров в секунду в спринте на 100 метров.
Высокотехнологичный компонент робо-ботинка представляет собой пружину переменной жесткости, которая может увеличить свою жесткость без изменения накопленной энергии. Жесткость пружины определяет, насколько сильно она может давить на землю для ускорения тела бегуна – чем жестче пружина, тем больше сила при таком же сжатии пружины.
Обычные пружины, такие как в выдвижных ручках, имеют постоянную жесткость в зависимости от материала, формы и размера пружины. Пружины переменной жесткости – это особый тип пружин, которые могут изменять форму или размер. Один тип пружины переменной жесткости увеличивает жесткость, становясь короче. Механизм укорачивает пружину, перемещая точку крепления пружины от ее конца к ее середине. Механизм в робо-ботинке укорачивает пружину, поскольку бегун вытягивает свою ногу в воздухе.
Увеличение жесткости пружины, когда бегун набирает скорость, аналогично переключению на более высокую передачу на велосипеде, когда велосипедист едет быстрее. Это позволяет бегунам поставлять больше энергии и обходить биомеханическое ограничение подачи энергии только в течение короткого времени контакта с землей при скоростном беге.
Следующие шаги
Современные гоночные велосипеды почти удваивают максимальную скорость бега. Роботизированные ботинки, которые используют велосипедную механику, могут также позволить людям бегать быстрее без здоровенных моторов и батарей. Эти более портативные устройства, работающие на людях, могли бы обеспечить более широкое внедрение носимых роботизированных технологий и могли бы раздвинуть границы поиска и спасения, обеспечения правопорядка и спорта.
Что бы значило для тех, кто первым реагирует, быстрее двигаться на 50%? Приведет ли кроссовка, которая обеспечивает увеличение скорости на 50%, к новому событию на Олимпиаде, подобному катанию на коньках и велогонкам?
Используя науку и передовые технологии робототехники, мы можем представить роботы-ботинки нового поколения, которые предлагают первый значительный импульс для движения человека, начиная с изобретения велосипедной педали в 19 веке.
По материалам Techxplore
Разместить у себя на сайте или блоге:
На любом форуме в своем сообщении: