SQuad – миниатюрный робот, который может ходить и преодолевать препятствия
Исследователи из Билкентского университета в Турции недавно создали небольшого четвероногого робота по имени SQuad, который сделан из мягких конструкционных материалов. Этот уникальный робот, представленный в статье, опубликованной в IEEE Robotics and Automation Letters, является более гибким, чем существующие миниатюрные роботы, и, следовательно, лучше преодолевает препятствия в своем окружении.
“Мы работаем над миниатюрными роботами уже почти десять лет”, – сказал Онур Озкан, один из исследователей, проводивших исследование с миниатюрным роботом. – “Несмотря на то, что миниатюрные роботы имеют много преимуществ, таких как дешевизна, поскольку им требуется меньше материалов, и возможность доступа в ограниченные пространства, одним из их основных недостатков является отсутствие способности передвижения, особенно на пересеченной местности”.
Крошечные роботы имеют тенденцию легко застрять при движении в окружающей среде, так как их высота не позволяет им подниматься или избегать препятствий. Озкан и его коллеги попытались преодолеть это ограничение, внедрив принцип, известный как “соответствие тела”.
“Мы думали, что, сделав наших миниатюрных роботов мягкими, они смогут использовать свое тело, чтобы преодолевать препятствия, как это делают большинство биологических систем, таких как насекомые или мыши”, – сказал Озджан.
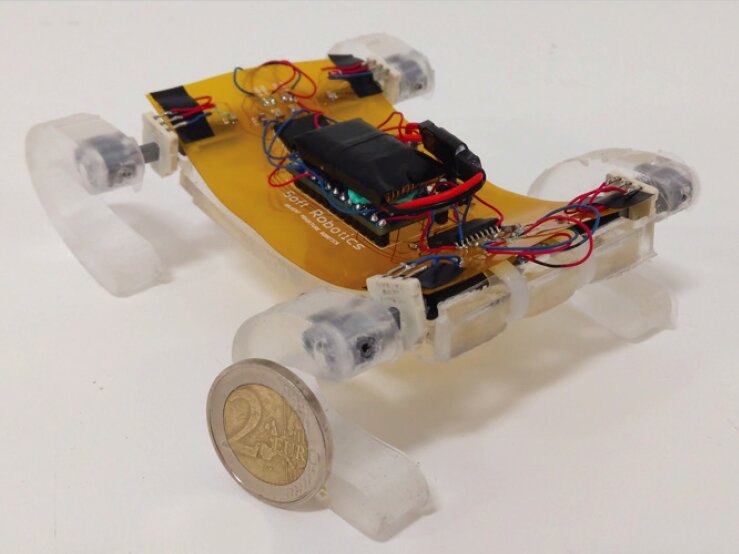
SQuad, четырехплечий робот размером с ладонь, разработанный исследователями, в основном сделан из мягких материалов, таких как полидиметилсилоксан (PDMS). Робот также имеет мягкие С-образные ножки со встроенными двигателями постоянного тока, которые обеспечивают их вращение.
“Большинство мягких роботов построены с использованием пневматических приводов” , – сказал Озджан. – “Эти приводы очень хорошо работают и интегрируются с мягкими материалами, но им нужен источник сжатого воздуха, который часто делает роботов громоздкими, а иногда не допускает беспрепятственного передвижения. Мы хотели разработать робота, который бы объединял лучшее из двух отраслей, используя мягкие материалы для создания совместимого робота, но также с использованием обычных приводов, таких как двигатели постоянного тока, которые легко обеспечивают миниатюризацию и беспрепятственное передвижение”.
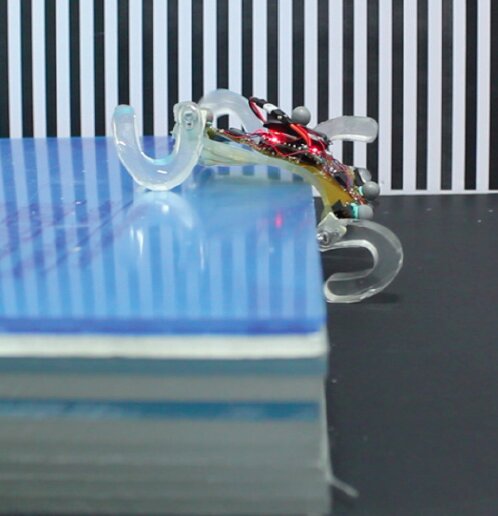
Исследователи оценили своего робота в серии экспериментов, сравнив его локомоторные характеристики с характеристиками идентичного робота, изготовленного из жесткого материала. SQuad значительно превзошел другого робота, намного эффективнее преодолевая препятствия.
Примечательно, что робот, разработанный Озканом и его коллегами, мог преодолевать препятствия, которые были в 1,44 раза выше его роста. С другой стороны, жесткий робот, с которым они сравнивали его, мог успешно преодолевать только препятствия, которые в 0,88 раза превышали его рост.
“Разница, которую мы наблюдали в масштабируемой высоте препятствий, связана с податливостью тела SQuad”, – сказал Озджан. – “Мы думаем, что с таким улучшением мы сможем использовать этого робота в целях проверки (с добавленной на борту небольшой камерой) или для поиска выживших под обрушившимся зданием (опять же, возможно, с помощью камеры и микрофона для обнаружения выживших)”.
В будущем робот, разработанный Озканом и его коллегами, мог выполнять различные простые миссии на суше. Его высокая гибкость, податливость тела и улучшенная способность преодолевать препятствия могут также позволить ему ползти через небольшие отверстия и перемещаться по неструктурированной или неровной местности, например, на месте, где рухнуло здание.
В настоящее время исследователи планируют несколько дополнительных исследований, направленных на повышение производительности их робота и возможностей передвижения. Во-первых, они планируют изучить методы, которые могут улучшить походку и движения SQuad. Они также планируют разработать и синтезировать новые полимеры с благоприятными свойствами, которые можно использовать для создания миниатюрных роботов. Эти новые материалы могут улучшить навыки передвижения своего робота или могут быть использованы для создания мягких датчиков, которые будут встроены непосредственно в тело их робота.
“Мы постоянно обновляем наш дизайн”, – сказал Озджан. – “Мы добавляем механизм сокращения тела, чтобы заставить нашего робота проходить через отверстия, которые меньше его поперечного сечения. Он будет кратковременно сжиматься и проходить через небольшие отверстия, что напоминает поведение мышей. Мы также работаем над динамической моделью робота, чтобы понять двигательную систему миниатюрных и мягких роботов в лучшую сторону”.
По материалам Techxplore
Разместить у себя на сайте или блоге:
На любом форуме в своем сообщении: